Blog
 By Colin
By Colin
Posted: May 12, 2022 Read time: 10 Minutes
A limited slip differential, or LSD, reduces individual wheelspin and improves traction on a car. When a wheel has lost traction, the limited slip differential senses this and sends power to the wheel with the most grip. Usually found on performance or off-road cars, an LSD gives the driver more control when taking a corner at high speeds.
Unless you’re seriously into your track days or automotive engineering, you’ve probably not spent too much time dwelling on what a Limited Slip Differential actually is, how it works or why you might need one.
Keep reading to learn more about LSDs so you can make an informed decision as to whether it’s a must for your track day car.
Before we dive into the workings of a Limited Slip Differential, it’s worth going back to basics and taking a look at what a standard differential. Why is it needed in the first place? Let’s take a look at a simple example of a car going round a circular track.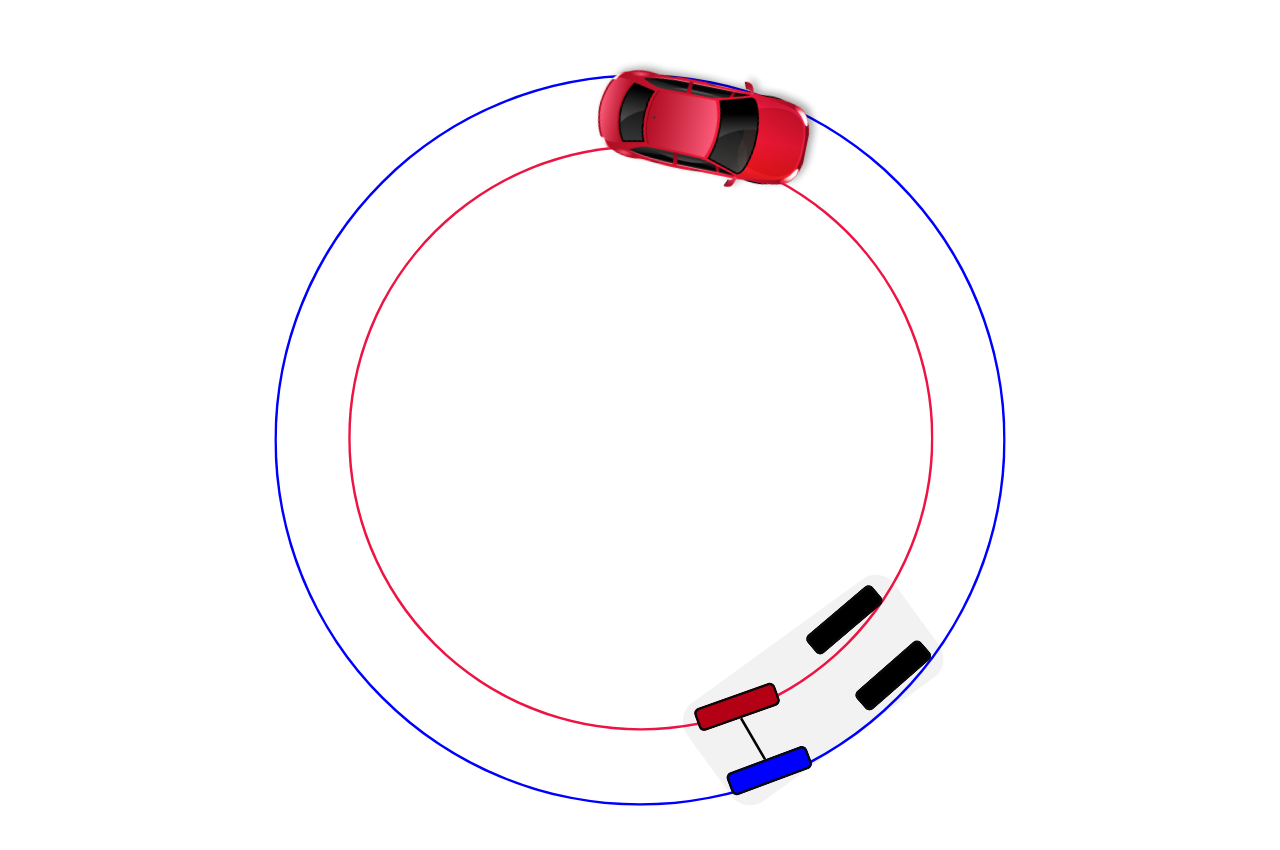
In the example image above, the red and blue lines represent the corresponding journeys the inner and outer wheels of the vehicle make.
The outer wheel has to travel a considerable distance more than the inner, meaning if it is to keep up with the inner wheel, it has to travel faster to do so. If it didn’t, the car would either have to go forward in a straight line, or the outer wheel would experience significant pressure to rotate quicker until eventually, the tension would relive itself with a wheel skipping over the surface, or with a drive shaft snapping.
With neither of these being a desirable outcome, the differential was born.
It works perfectly well at slow to moderate speeds in favourable road conditions, no matter how tight the turning circle might be.
One of the downfalls of an open differential, however, is that the rotational energy of the driveshaft, when transferred to the axel as torque, takes the path of least resistance.
If one wheel takes less energy to turn than the other, the torque will naturally be directed towards that wheel. Now that might not sound like too much of a big deal, but take the following example and you can see when this becomes a problem.
On a low traction surface, an Open Differential will send power to the wheel of least resistance, resulting in the tyre spinning or skipping. Let's put this into practice...
Imagine you’re parked at the bottom of a hill. Your car is half on the road and half on a wet, muddy verge. For you to move off, you’ll need to go up the hill so you take your foot off the clutch and accelerate away. Only that’s what you hoped to do.
The two wheels ‘tasked’ with pushing your vehicle forward have very different conditions to deal with ‘underfoot’. One has slippery mud which will allow the wheel to turn on the spot with minimal resistance, and without pushing the vehicle forward. The other has grippy tarmac. If this wheel is to turn, it will need to propel the car forward up the hill and that will require a significant amount of force.
As an open differential chooses the path of least resistance, the majority, if not all of the torque will be directed to the wheel in the mud causing this to spin without delivering any forward momentum to the vehicle itself.
Being an open differential has no limitation in the rotational speed differential between the two wheels, the further you press down on the accelerator, the more the wheel in the mud will spin without any additional power being transferred to the wheel on grippy tarmac. To get out of this tricky situation, you’ll either need to reverse or ask your unlucky passenger to get out and push.

Let’s imagine you want to take a corner at speed. As you approach the corner, you make the necessary speed adjustments with a view to accelerating through the corner and optimising your exit speed.
As you’ll know if you’ve spent time with us on one of our performance driving courses, using your accelerator intelligently through the corner allows you to bring better balance and grip to the car.
However, if we think of the forces applied to a car through a corner at speed, we can see that the outer wheels have far greater downforce applied to them and this makes them more difficult to turn.
In contrast, the inner wheels have a much lighter downward force. Depending on the severity of the corner, the suspension may be partially or even completely uncompressed (known as ‘in droop’) and the tyres may only just be in contact with the ground beneath them. If the surface is uneven, the tyres may even temporarily leave the tarmac. The result is that the lion’s share of the power from the driveshaft gets directed to the inner wheel as this is the path of least resistance.
Your inner wheel is likely to spin as it struggles to gain traction. Meanwhile, your outer wheel, which should be balancing the vehicle and powering you out of the corner, is struggling to receive any drive at all resulting in greater body roll, less control and a slower exit speed.
Well, as the name suggests, a limited slip differential limits the speed differential between the two (or four) driven wheels.
This magical component was first developed all the way back in 1935 to minimise excessive wheel spin in Grand Prix racing cars.
The first LSDs connected the two half axles together with a clutch pack allowing a limited amount of clutch slip between each side of the axle.
This ensured that the torque was more equally distributed between the two sides and when cornering at speed, Grand Prix cars were able to gain greater balance through a corner and great power out of it.
This classic video from the 1930s, explains the fundamentals of a Differential Gear in more depth.
As the years have gone on, technology has progressed and today there are a variety of different types of LSD on the market. These include viscous, mechanical, hydraulic and electronic systems. Systems can also be classed as:
With so many variances between them all, it’s simply not possible to go into depth on each one in this article but it’s safe to say...
If you’re serious about your track days and want to truly optimise your performance, a limited slip differential is an essential addition to your track day car.

"My car is fitted with an electronic braking system to reduce wheel slippage. Is this a good alternative to a limited slip differential?"
Many modern-day cars are fitted with an advanced electronic braking system (EBS) as an alternative to a traditional limited-slip differential.
The system harnesses various chassis sensors such as speed sensors, anti-lock braking system (ABS) sensors, accelerometers, and microcomputers to electronically monitor wheel slip and vehicle motion.
When the chassis control system determines a wheel is slipping, the computer applies the brakes to that wheel.
A significant difference between the limited-slip differential systems and this brake-based system is that brake-based systems do not inherently send the greater torque to the slower wheel, they simply stop the wheel from slipping.
That said, McClaren have perfected the technique - changing torque distribution using varying degrees of brake application, via an open differential. I’m fascinated to see where this brand of technology takes use, could it be the end of the LSD? Let’s wait and see.
Call: 01234 757 633
Email: info@catdrivertraining.co.uk
Attend a course & feel your knowledge & technique has not developed, you've not been taught new skills, or not been treated with respect & professionalism, your money will be refunded. It’s as simple as that.
The CAT Team look forward to working with you.
Colin Hoad
CAT Driver Training is the fast way to develop & improve authentic dynamic driving skill, technique & knowledge from the Best. OEM recognised driver training for individuals & the motor industry. As the leading UK based independent advanced performance driving skills company, we exist to make your driving experience even better. Explore your cars potential, fulfill your own. Coaching advanced road & track skills, safety driver training courses for individual driving enthusiasts & advanced driving for all facets of the motor industry. The only training company resident within UTAC's Millbrook Proving Ground in Bedfordshire, within easy reach of London, & all surrounding counties: Hertfordshire; Buckinghamshire; Oxfordshire; Nottinghamshire; Cambridgeshire; Norfolk; Suffolk; Essex; & Surrey. Clients travel from the World over & the UK to learn from the authentic evidence based dynamic driving & vehicle dynamic experts. | All Rights Reserved | Copyright 2005 – 2025
Some of the links we use are affiliate links. This means that, at no cost to you, CAT will earn an affiliate commission if you click through the link and finalise a purchase.
Designed by WHP
Coded and built by Prominent Media
 By Suzy Wallace
By Suzy Wallace